

Halbautomatische Qualitätskontrolle der Klassifikation eines LiDAR-Datensatzes

Die Beschaffung von LiDAR-Daten auf nationaler oder kantonaler Ebene ist mittlerweile gängige Praxis. Mehrere Kantone haben bereits Befliegungskampagnen zu unterschiedlichen Zeitpunkten durchgeführt. Auf Bundesebene steht swisstopo kurz vor dem Abschluss seiner 2017 begonnenen, flächendeckenden Erfassungskampagne.
Die aus LiDAR-Aufnahmen gewonnenen Punktwolken werden nach der Beschaffung klassifiziert. Jeder Punkt erhält dann ein Label wie Gebäude, Vegetation, Boden, usw. Halbautomatische Methoden werden heute häufig verwendet, um diese Aufgabe zu erfüllen. Fehler bei der Klassifizierung sind jedoch nach wie vor unvermeidbar und der Personalaufwand für die Kontrolle ist beträchtlich.
Die Lösung, die das STDL entwickelt hat , soll die Veränderungen der Klassifizierung in einer Punktwolke im Vergleich zu einer früheren Generation, die als Referenzgeneration betrachtet wird, hervorzuheben. Sie ermöglichte es den Operateuren ausserdem, einen Schweregrad der erkannten Veränderungen zu erhalten. Diese in Abbildung 1 dargestellte Methode soll eine gezieltere und effizientere Kontrolle zukünftiger Generationen von Punktwolken ermöglichen.
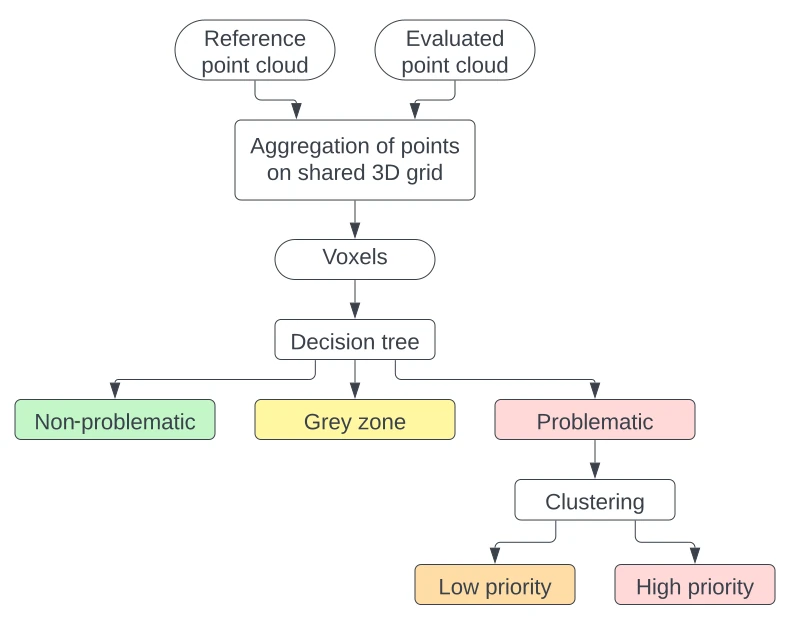
Abbildung 1. overall workflow
Für dieses Projekt verwendete das STDL Daten von swissSURFACE3D über das Gebiet von Neuchâtel (2018) sowie neuere Daten, die vom Kanton Neuchâtel gesammelt wurden (2022).
Beide Punktwolken wurden auf ein 3-dimensionales Raster mit einer Maschenweite von 1.5m “voxelisiert”. Die Klassenverteilung innerhalb der Voxel wurde zwischen den Generationen verglichen und mithilfe des in Abbildung 2 unten dargestellten Entscheidungsbaums in die vegeordnet. Für Entscheidungen, die die Verteilung der Klassen zwischen den Generationen vergleichen, wird die Kosinus-Ähnlichkeit verwendet.

Abbildung 2: Entscheidungsbaum
Die Zahlen, die den einzelnen Ausgängen des Entscheidungsbaums zugeordnet sind, entsprechen den folgenden Definitionen:
Graue Zone:
- 7 – Zunahme von nicht klassifizierten Punkten: Ein neuer Voxel oder eine Änderung des Klassenverteilung aufgrund von nicht klassifizierten Punkten in der neuen Generation,
- 8 – Zusätzliche Klassen in der Zone: Änderung der Klassenverteilung aufgrund zusätzlicher Klassen in dem Voxel im Vergleich zur Referenzgeneration. Die benachbarten Voxels enthalten ebenfalls die neue Klasse.
Problematisch:
- 9 – Verschwinden einer Geometrie: Ein Voxel, das in der Referenzgeneration Punkte enthielt, enthält in der neuen Generation keine Punkte mehr. Benachbarte Voxel in der neuen Generation teilen sich nicht die gleichen Klassen;
- 10 – Erscheinen einer Geometrie: Ein Voxel, das in der Referenzgeneration keine Punkte enthielt, in der neuen Generation jedoch schon. Die benachbarten Voxel der Referenzgeneration teilen sich nicht die gleichen Klassen.
- 11 – Isolierte geringfügige Änderung: Eine Änderung der Klassenverteilung aufgrund zusätzlicher Klassen, die im Voxel vorhanden sind. Benachbarte Voxel teilen sich nicht die gleichen Klassen;
- 12 – Grössere Änderung der Klassenverteilung: Änderung der Verteilung zwischen Klassen, die bereits im Voxel vorhanden waren und solchen, die neu hinzugekommen sind;
- 13 – Rauschen: Vorhandensein von Punkten, die in der neuen Generation als Rauschen klassifiziert wurden.
Um die Menge der durchzuführenden Kontrollen zu begrenzen, werden die Voxel mit DBSCAN in Clustern zusammengefasst. Die Cluster zeigen die Bereiche an, die vorrangig kontrolliert werden sollen. Die isolierten Voxel können sekundär kontrolliert werden.
Wie in Abbildung 3 ersichtlich, sind über 80% der Punkte der neuen Generation auf der Kachel 25470000_1211500, die einen Teil der Stadt Le Locle abdeckt, als "unproblematisch" eingestuft. Nur 3 % der Punkte befinden sich in problematischen Voxeln und wären für eine:n Betreiber:in zu kontrollieren. Davon gehören 2,56% zum Ausgang 12 des Entscheidungsbaum, d.h. eine grössere Veränderung der Klassenverteilung wird erkannt.
Innerhalb der grauen Zone befinden sich 15.35% der Punkte in Bereichen, in denen im Vergleich zur Referenzgeneration zusätzliche Klassen vorhanden sind.
Die Ausgänge 4 und 9 des Entscheidungsbaums enthalten keine Punkte der neuen Generation, da es sich hierbei um Fälle handelt, in denen Voxel verschwunden sind.
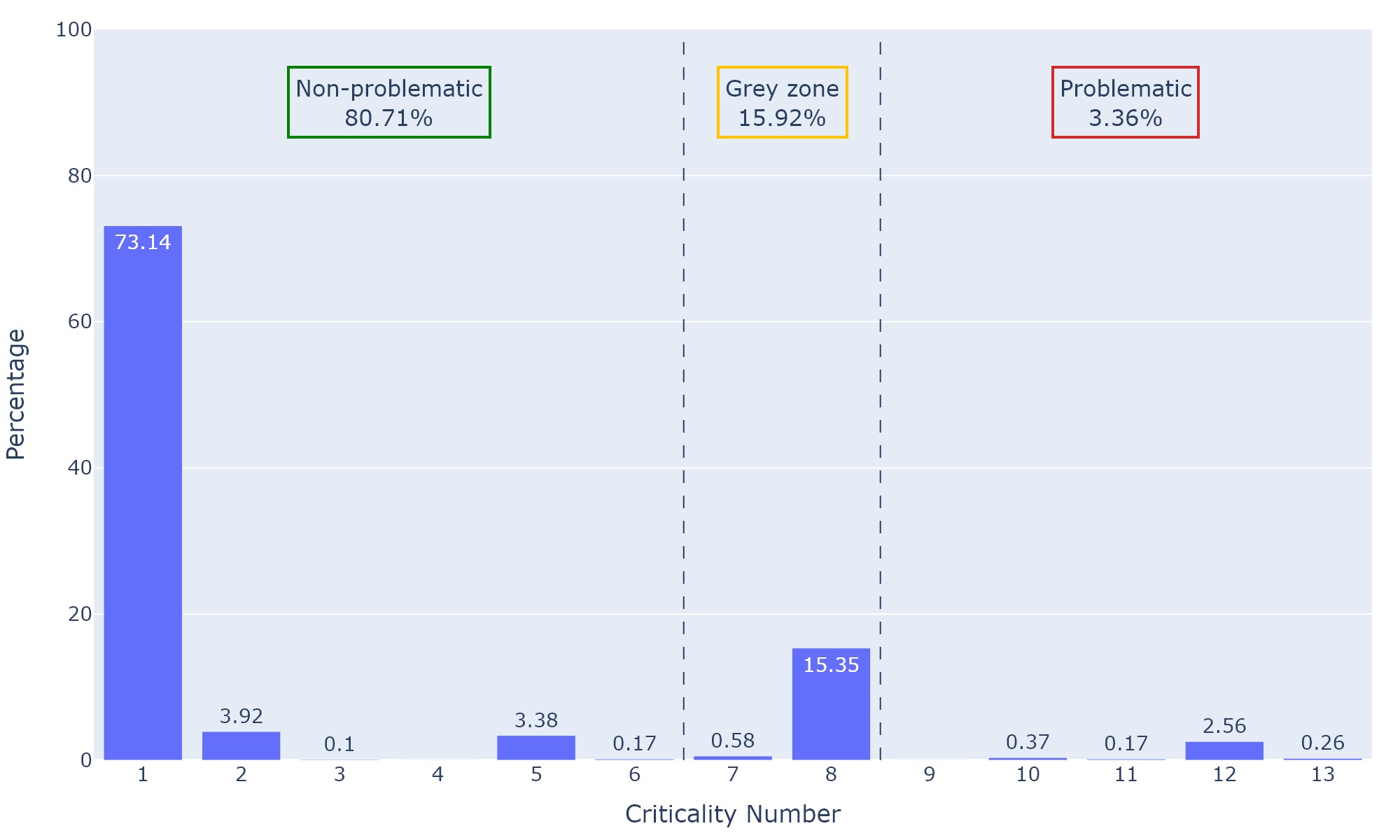
Abbildung 3: Relative Verteilung der Punkte der neuen Generation in Abhängigkeit von der Ausgabe des Entscheidungsbaums, die dem entsprechenden Voxel zugewiesen wird. Ergebnisse für die Kachel 25470000_1211500.
Nachdem die problematischen Voxel zu Clustern zusammengefasst wurden, bleiben 8'756 Voxel übrig, die auf 263 Cluster verteilt sind. Beispiele sind in Abbildung 4 zu sehen. Die Cluster werden in der Form von Polygonen dargestellt. Dieses Format wurde vom Fachexperte benötigt.. Ein Bereich (#1) zeigt das Verschwinden eines Baumes an. Ein weiteres Feld (#2) zeigt das Auftreten einer Geometrie an. Bei näherer Betrachtung sind die Voxel, die zum Cluster beitragen, unterschiedlichen Typen zuzuordnen: "Erscheinen" und "Klassenwechsel". Die am häufigsten vorkommende Bezeichnung wird dem Cluster zugewiesen. Schliesslich werden zwei Bereiche mit unterschiedlichen Klassifizierungen hervorgehoben: Einer (#3) für eine Gebäudestruktur, die von der Klasse “nicht klassifiziert” in die Klasse “Gebäude“ übergeht, und einer (#4) für einen Schuppen, der von der Klasse “nicht klassifiziert” in die Klasse “Vegetation” übergeht.
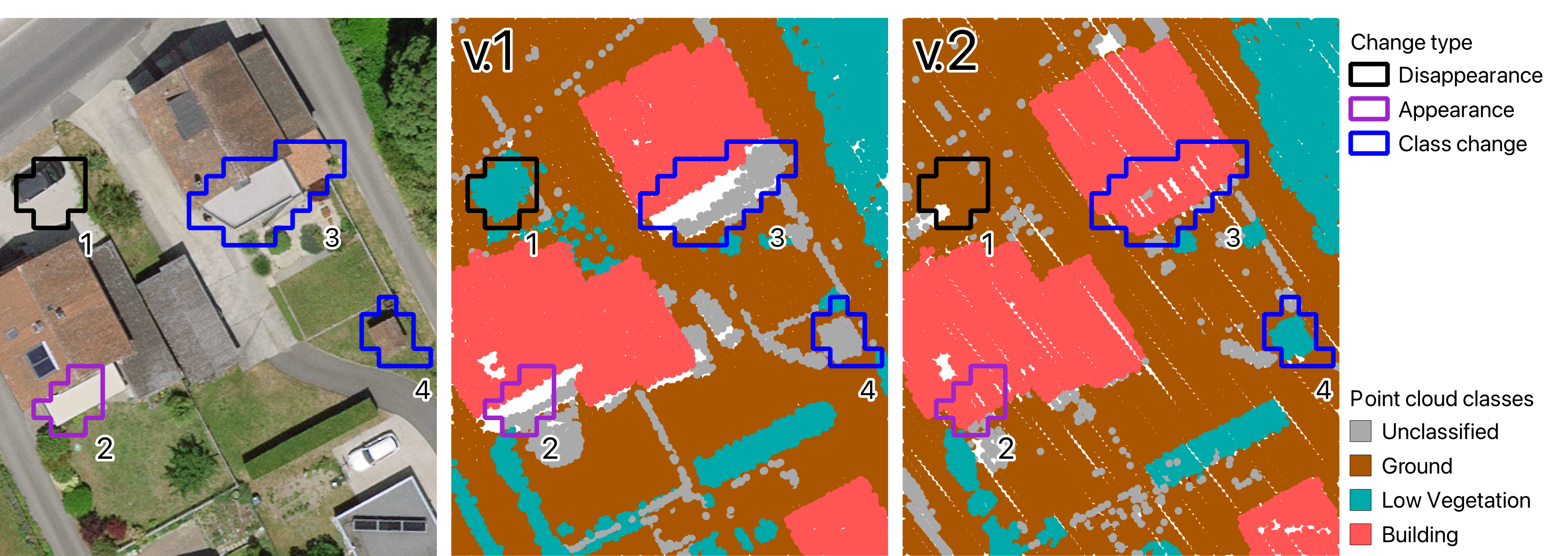
Abbildung 4: Beispiel für ein Cluster mit Punktwolken für die Referenzgeneration (v.1) und die neue Generation (v.2).
Der Fachexperte untersuchte 8 Voxel für jeden Ausgang des Entscheidungsbaums und überprüfte die erzeugten Cluster. Die Ergebnisse waren zufriedenstellend. Daher wird der Algorithmus bei der Produktion der nächsten Punktwolke für das Produkt swissSURFACE3D im Sommer 2024 getestet.
Die Methode und die detaillierten Ergebnisse sind auf unserer technischen Website verfügbar.
Der Quellcode des Projekts ist auf GitHub verfügbar.